
What Is CAN Bus? Working Principle, Structure, and How to Check Errors on Electric Forklifts
Th10
What Is CAN Bus? Working Principle, Structure, and How to Check Errors on Electric Forklifts
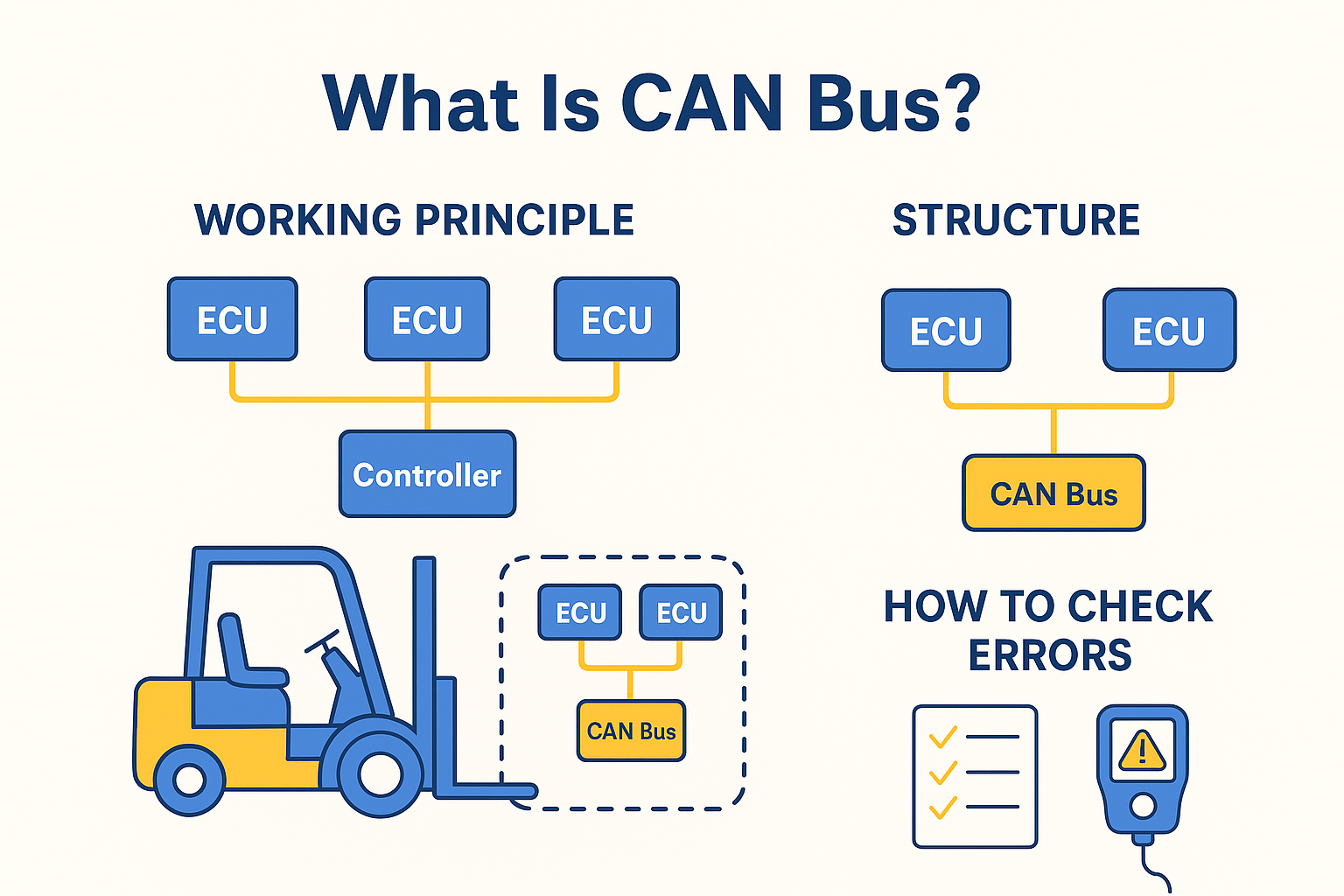
🔹 1. What is CAN Bus?
CAN Bus (Controller Area Network) is a high-speed communication system that allows different controllers in an electric forklift to exchange information using just two wires:
👉 CAN_H (High) and CAN_L (Low).
This technology is widely used in electric forklifts, cars, trucks, and industrial robots, enabling stable, accurate, and efficient data transmission with fewer cables.
For example, on EP or Heli electric forklifts, the CAN bus connects the main controller with:
-
Steering controller
-
Lift controller
-
Display unit
-
Lithium battery BMS
🔹 2. CAN Bus Structure on Electric Forklifts
A typical CAN bus network includes:
| Component | Description |
|---|---|
| CAN_H & CAN_L wires | Twisted pair cables to reduce noise. |
| 120Ω termination resistors | Two resistors at both ends of the bus stabilize signals. |
| End devices | Controller, Display, BMS, Motor driver, etc. |
| Power source | Usually 12V, 24V, or 48V DC. |
Basic diagram:
🔹 3. Working Principle of CAN Bus
CAN bus uses differential signaling to transmit data:
-
When sending data: CAN_H rises to ~3.5V, CAN_L drops to ~1.5V
-
When idle: both lines sit around 2.5V
This ensures:
✅ High noise immunity
✅ Stable communication
✅ Reliable performance even near motors and in harsh environments
🔹 4. Advantages of CAN Bus System
| Advantage | Explanation |
|---|---|
| Fewer wires | Only two wires are needed for multiple devices. |
| High speed & stable | Fast and noise-resistant communication. |
| Automatic fault detection | System detects short, open, or hardware faults. |
| Multi-device communication | Many modules can share the same bus line. |
🔹 5. Symptoms of CAN Bus Faults
| Symptom | Possible Cause |
|---|---|
| Display shows no data | Lost connection between Display and Controller |
| “CAN Error” or “No Communication” | Short or open circuit in CAN lines |
| Forklift won’t start | No CAN communication signal |
| Data flickers or freezes | Noise or reversed CAN_H/CAN_L wiring |
🔹 6. How to Check the CAN Bus
🔸 Step 1: Check termination resistance
-
Turn off key switch (Key OFF)
-
Measure resistance between CAN_H and CAN_L
✅ Normal value: ≈ 60Ω
120Ω → missing one resistor
0Ω or ∞ → short or open circuit
🔸 Step 2: Measure voltage when powered on
-
Turn on key (Key ON)
-
Measure voltage of each line to ground:
| Line | Normal value |
|---|---|
| CAN_H – GND | 2.5V ~ 3.5V |
| CAN_L – GND | 1.5V ~ 2.5V |
| CAN_H – CAN_L | ≈ 2V |
If voltage doesn’t fluctuate → communication error.
🔸 Step 3: Check wiring continuity
-
Test continuity between CAN wires at both ends
-
Resistance ≈ 0Ω → good
-
OL or high → open circuit
-
Very low between CAN and GND → short to ground
🔹 7. Technician Tips
✅ Measuring resistance between CAN_H and CAN_L is the quickest diagnostic method.
✅ There should only be two 120Ω resistors — one at the controller, one at the display.
✅ Always use twisted pair cables for CAN wiring.
✅ Avoid running CAN cables alongside power lines.
✅ Never install more than two termination resistors.
🔹 8. Conclusion
The CAN Bus system is the communication backbone of every electric forklift.
Understanding its structure and diagnostic methods helps technicians find faults faster, repair accurately, and reduce downtime.

