
CAN Bus Là Gì? Nguyên Lý Hoạt Động, Cấu Tạo Và Cách Kiểm Tra Khi Bị Lỗi Trên Xe Nâng Điện
Th10
CAN Bus Là Gì? Nguyên Lý Hoạt Động, Cấu Tạo Và Cách Kiểm Tra Khi Bị Lỗi Trên Xe Nâng Điện
🔹 1. CAN Bus là gì?
CAN Bus (Controller Area Network) là hệ thống truyền thông dữ liệu tốc độ cao, giúp các bộ điều khiển (bo mạch) trên xe nâng điện trao đổi thông tin với nhau qua hai dây tín hiệu:
👉 CAN_H (High) và CAN_L (Low).
Công nghệ này được dùng rộng rãi trong xe nâng điện, ô tô, xe tải, và robot công nghiệp, giúp hệ thống hoạt động ổn định – chính xác – tiết kiệm dây dẫn.
Ví dụ:
Trên xe nâng điện EP hoặc Heli, CAN bus giúp bo điều khiển trung tâm (controller) truyền lệnh đến:
-
Bo lái (Steering controller)
-
Bo nâng (Lift controller)
-
Màn hình hiển thị (Display)
-
BMS của pin Lithium
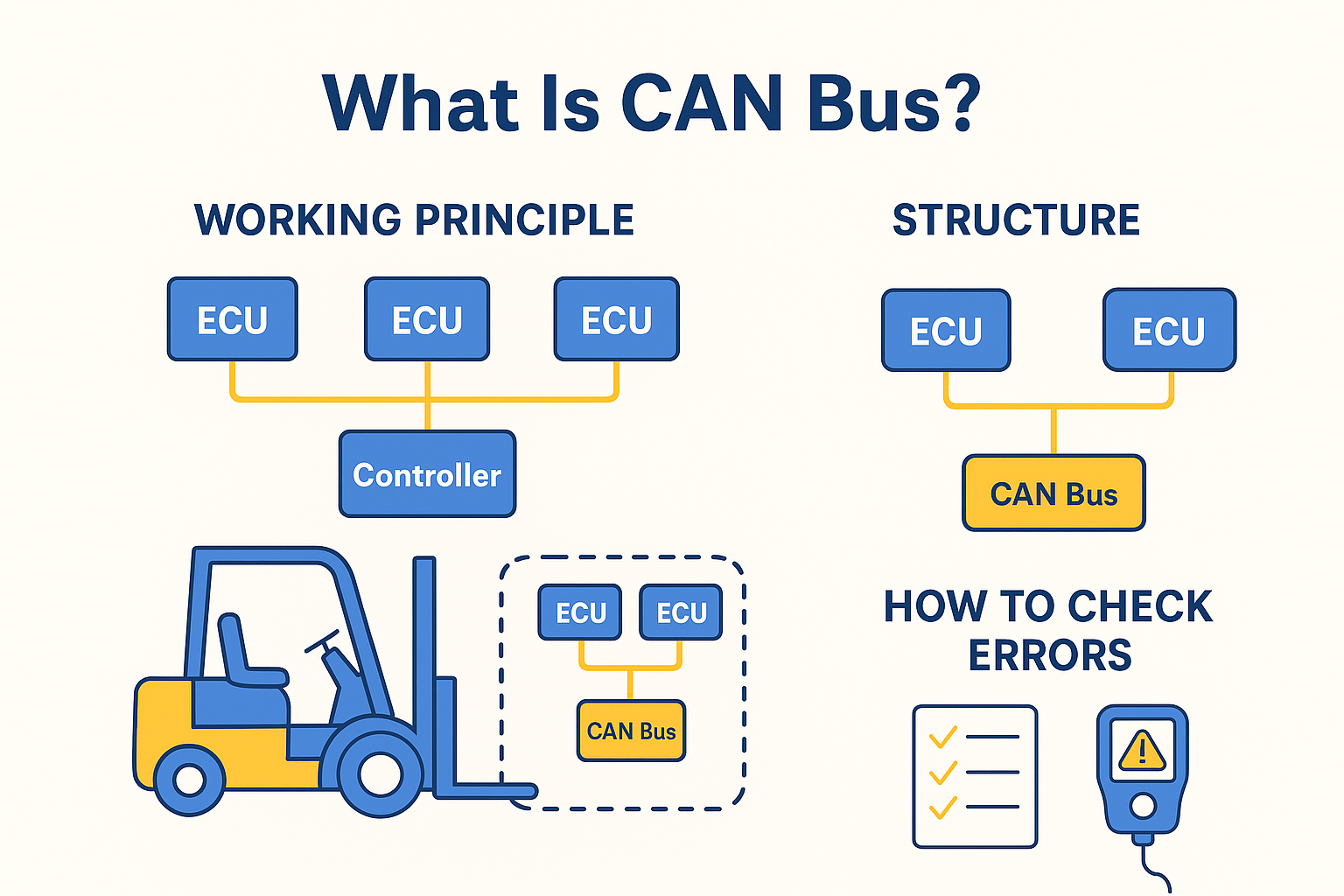
🔹 2. Cấu tạo mạng CAN Bus trên xe nâng điện
Một hệ thống CAN bus cơ bản gồm các thành phần:
| Thành phần | Mô tả |
|---|---|
| Dây CAN_H & CAN_L | Dây xoắn đôi (twisted pair) để giảm nhiễu. |
| Điện trở kết thúc 120Ω | Có 2 điện trở ở 2 đầu mạng, giúp ổn định tín hiệu. |
| Thiết bị đầu cuối | Controller, Display, BMS, Motor Driver, v.v. |
| Nguồn cung cấp | Thường lấy từ hệ thống 12V, 24V hoặc 48V. |
Sơ đồ khối đơn giản:
🔹 3. Nguyên lý hoạt động của CAN Bus
CAN bus hoạt động theo nguyên tắc truyền thông vi sai (differential signal):
-
Khi gửi dữ liệu, CAN_H tăng điện áp lên khoảng 3.5V,
còn CAN_L giảm xuống khoảng 1.5V. -
Khi không gửi dữ liệu, cả hai dây ở mức 2.5V.
Điều này giúp tín hiệu:
✅ Ổn định hơn
✅ Chống nhiễu điện từ tốt
✅ Vẫn hoạt động chính xác ngay cả trong môi trường có động cơ công suất lớn (như xe nâng điện).
🔹 4. Ưu điểm của hệ thống CAN Bus
| Ưu điểm | Giải thích |
|---|---|
| Giảm số lượng dây dẫn | Chỉ cần 2 dây truyền dữ liệu giữa nhiều thiết bị. |
| Tốc độ cao & ổn định | Giao tiếp nhanh, chống nhiễu mạnh. |
| Phát hiện lỗi tự động | Khi có chập, đứt hoặc lỗi phần cứng, hệ thống tự báo. |
| Tương thích nhiều thiết bị | Nhiều module có thể cùng giao tiếp trên một đường bus. |
🔹 5. Dấu hiệu lỗi đường truyền CAN Bus
Khi mạng CAN bị lỗi, xe nâng sẽ xuất hiện một hoặc nhiều hiện tượng sau:
| Hiện tượng | Nguyên nhân khả dĩ |
|---|---|
| Màn hình không hiển thị dữ liệu | Mất truyền thông giữa Display và Controller |
| Báo lỗi “CAN Error” hoặc “No Communication” | Chập hoặc đứt dây CAN |
| Xe không hoạt động dù còn điện | CAN Bus mất tín hiệu điều khiển |
| Dữ liệu hiển thị sai, giật | Nhiễu hoặc đấu ngược dây CAN_H – CAN_L |
🔹 6. Cách kiểm tra đường truyền CAN Bus (thực tế)
🔸 Bước 1: Kiểm tra điện trở kết thúc
-
Tắt khóa điện (Key OFF)
-
Đo điện trở giữa CAN_H và CAN_L bằng đồng hồ vạn năng
-
Kết quả chuẩn: ≈ 60Ω
Nếu chỉ còn 120Ω → mất 1 điện trở kết thúc
Nếu 0Ω hoặc ∞ → dây bị chập hoặc đứt
🔸 Bước 2: Kiểm tra điện áp khi hoạt động
-
Bật khóa điện (Key ON)
-
Đo điện áp từng dây so với mass
| Dây đo | Giá trị bình thường |
|---|---|
| CAN_H – GND | 2.5V ~ 3.5V |
| CAN_L – GND | 1.5V ~ 2.5V |
| CAN_H – CAN_L | ≈ 2V |
Nếu không dao động hoặc cùng mức → lỗi truyền thông.
🔸 Bước 3: Kiểm tra dây dẫn
-
Đo liên tục (continuity test) giữa các đầu dây CAN
-
Điện trở ≈ 0Ω → tốt
-
OL hoặc rất cao → dây đứt
-
Điện trở thấp giữa CAN và mass → chạm mass
🔹 7. Mẹo thực tế của kỹ thuật viên xe nâng
✅ Đo điện trở giữa hai dây CAN là cách nhanh nhất để xác định lỗi.
✅ Mỗi mạng CAN chỉ có 2 điện trở 120Ω, thường ở controller và display.
✅ Dây CAN phải xoắn đôi và không đi chung với dây nguồn động cơ.
✅ Khi lắp thêm module mới, không thêm điện trở kết thúc thứ 3.
🔹 8. Kết luận
Hệ thống CAN Bus là mạch máu truyền thông của xe nâng điện.
Việc hiểu rõ nguyên lý và biết cách kiểm tra giúp kỹ thuật viên chẩn đoán lỗi nhanh – sửa đúng chỗ – tránh thay linh kiện oan.

