
什么是 CAN 总线?原理、结构及叉车故障检测方法
24
Th10
Th10
什么是 CAN 总线?原理、结构及叉车故障检测方法
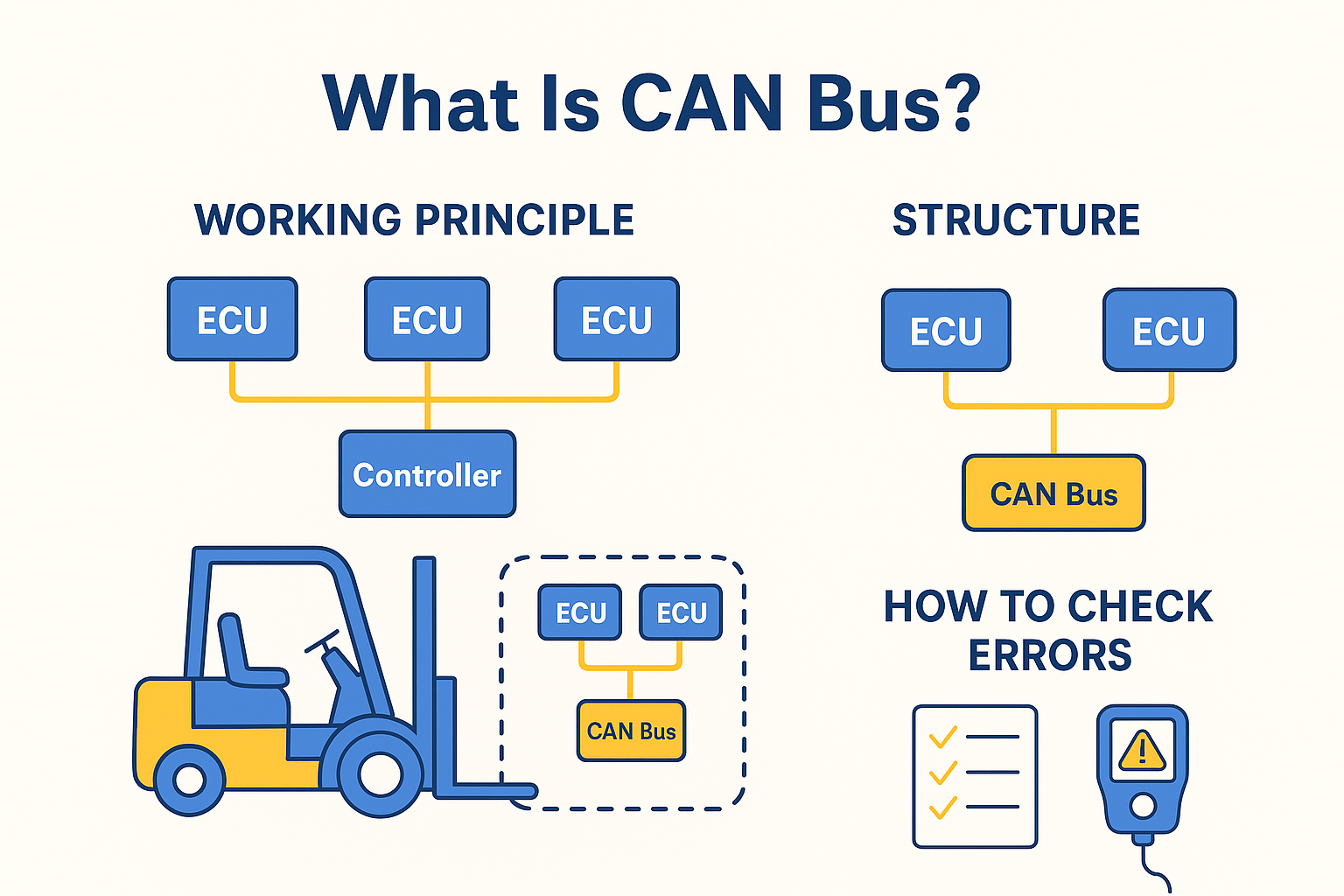
🔹 1. 什么是 CAN 总线?
CAN 总线(Controller Area Network) 是一种高速通信系统,用于让叉车内部的多个控制器通过两根信号线交换数据:
👉 CAN_H(高电平) 和 CAN_L(低电平)。
这种技术广泛应用于 电动叉车、汽车、卡车和工业机器人,可实现稳定、精准且抗干扰的通信。
例如,在 EP 或合力叉车 上,CAN 总线连接:
-
主控制器(Controller)
-
转向控制板(Steering Controller)
-
起升控制板(Lift Controller)
-
显示屏(Display)
-
锂电池管理系统(BMS)
🔹 2. CAN 总线的基本结构
一个典型的 CAN 总线系统包括:
| 部件 | 说明 |
|---|---|
| CAN_H 和 CAN_L 信号线 | 双绞线结构,用于抗干扰。 |
| 120Ω 终端电阻 | 位于总线两端,稳定信号传输。 |
| 终端设备 | 控制器、显示屏、BMS、电机驱动板等。 |
| 供电系统 | 一般为 12V、24V 或 48V DC。 |
简图:
🔹 3. CAN 总线的工作原理
CAN 总线采用差分信号传输原理:
-
发送数据时:CAN_H 升至约 3.5V,CAN_L 降至约 1.5V
-
空闲状态时:两线电压均约为 2.5V
优点:
✅ 抗干扰能力强
✅ 信号稳定
✅ 适合电动叉车等高电磁环境
🔹 4. CAN 总线的优点
| 优点 | 说明 |
|---|---|
| 减少线束数量 | 多设备共享两根信号线。 |
| 高速稳定 | 数据传输快,抗噪声强。 |
| 自动检测故障 | 系统能识别短路、断路、硬件错误。 |
| 兼容多设备通信 | 多模块可同时通讯。 |
🔹 5. CAN 总线故障表现
| 故障现象 | 可能原因 |
|---|---|
| 显示屏无数据 | 显示屏与控制器通讯中断 |
| 显示 “CAN Error” 或 “No Communication” | CAN 线路短路或断线 |
| 叉车无法运行 | CAN 总线无控制信号 |
| 数据抖动或错误 | CAN_H 与 CAN_L 接反或受干扰 |
🔹 6. CAN 总线检测方法
🔸 步骤 1:测量终端电阻
-
关闭钥匙电源(Key OFF)
-
用万用表测 CAN_H 与 CAN_L 电阻
✅ 正常值约 60Ω
若为 120Ω → 少一个终端电阻
若为 0Ω 或 ∞ → 短路或断线
🔸 步骤 2:测量工作电压
-
打开钥匙(Key ON)
-
分别测量电压:
| 测量点 | 正常值 |
|---|---|
| CAN_H – 地 | 2.5V ~ 3.5V |
| CAN_L – 地 | 1.5V ~ 2.5V |
| CAN_H – CAN_L | 约 2V |
若电压不变化 → 通讯异常。
🔸 步骤 3:检查线路
-
检查 CAN 线的连通性
-
电阻 ≈ 0Ω → 正常
-
电阻无穷大 → 断线
-
CAN 与地之间电阻过低 → 短路
🔹 7. 技术员实用建议
✅ 测 CAN_H 与 CAN_L 电阻是最简单快速的检测方法。
✅ 总线上只能有两个 120Ω 终端电阻(通常在控制器和显示屏)。
✅ 必须使用双绞线结构的 CAN 线。
✅ 避免与高压线平行布线。
✅ 不要随意增加第三个终端电阻。
🔹 8. 结论
CAN 总线系统 是电动叉车的通信核心。
掌握其原理与检测方法,能帮助技术人员快速定位故障、精准维修、提升效率。

